Ultrazvočni senzor razdalje
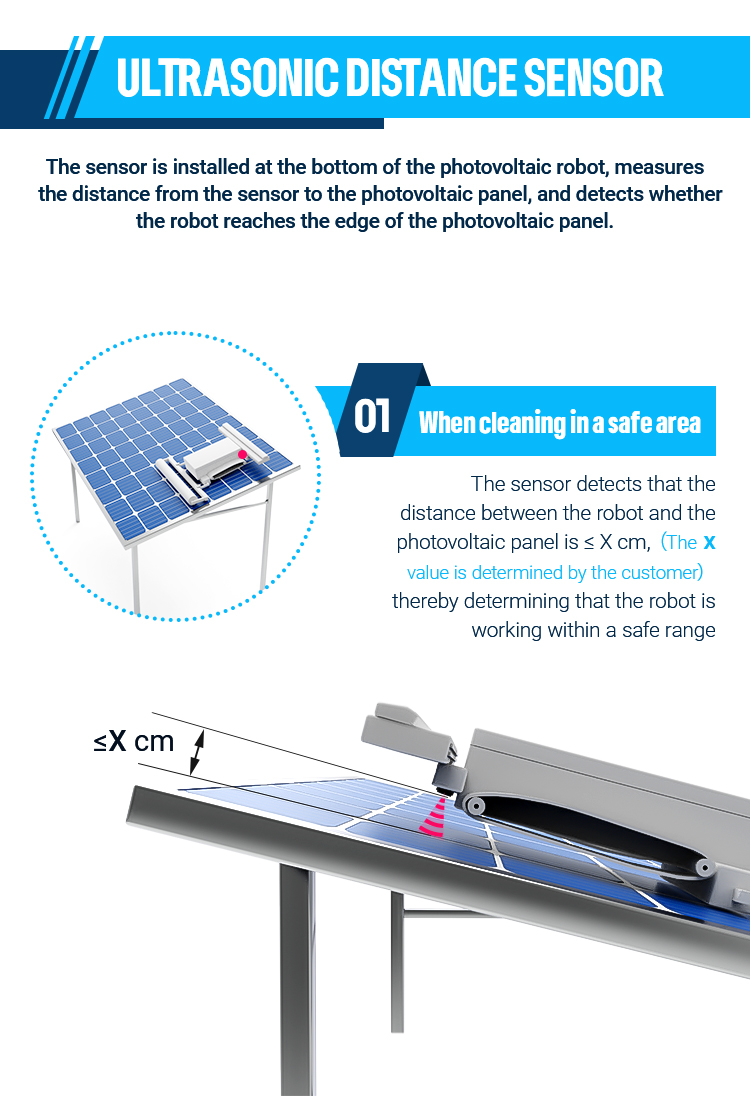
Senzor je nameščen na dnu fotonapetostnega robota, meri razdaljo od senzorja do fotonapetostnega panela in zazna, ali robot doseže rob fotovoltaičnega panela.
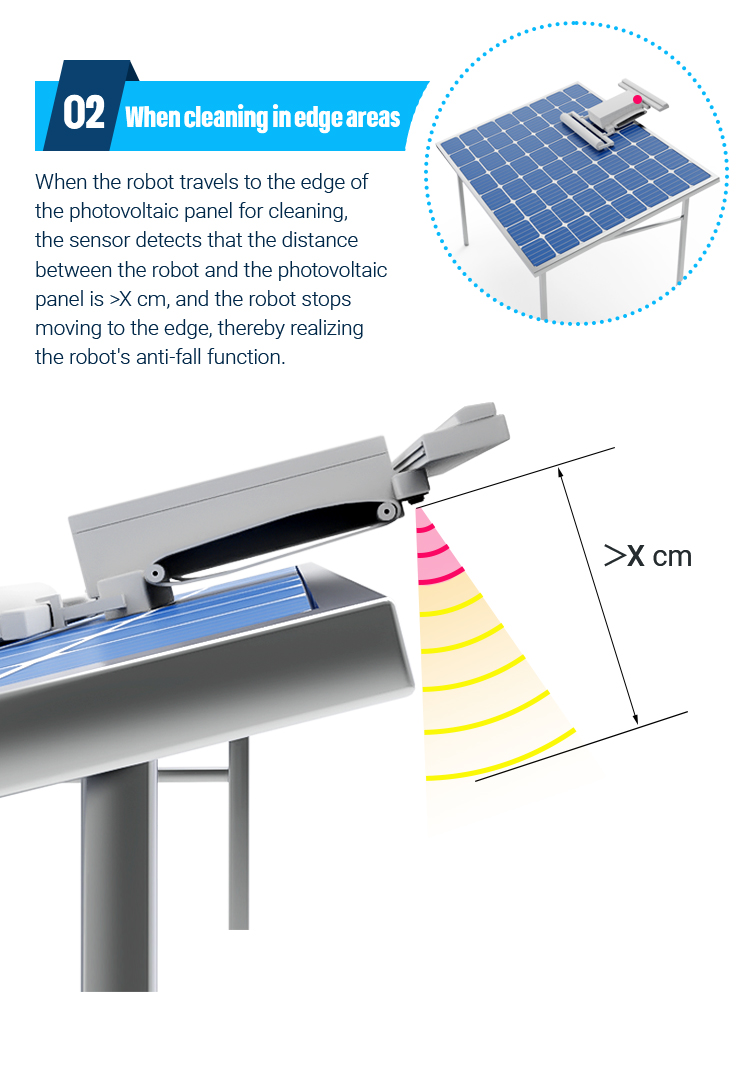
Fotonapetostni čistilni robot deluje v načinu prostega hoda po fotonapetostnih panelih, ki zlahka padejo in poškodujejo opremo; pohodna steza odstopa, kar vpliva na učinkovitost. S senzorjem za določanje razdalje lahko spremljate, ali robot visi v zraku, in mu pomagate pri hoji po sredini.